For decades, the image of a robot has been one of rigid, precise movements arms welding car frames or assembling circuit boards with unwavering, yet limited, motion. The human hand, with its complex symphony of bones, muscles, and nerves capable of everything from wielding a sledgehammer to threading a needle, remained the gold standard of manipulation, far beyond any machine’s reach. However, a profound revolution is quietly unfolding in laboratories and research centers worldwide. Robotics is achieving a milestone long considered the holy grail of the field: human-like dexterity. This leap forward is not merely an incremental improvement; it is a transformative shift poised to redefine industries, healthcare, and our very daily lives.
A. The Immense Challenge of Mimicking the Human Hand
To appreciate the magnitude of this achievement, one must first understand the engineering marvel that is the human hand. It is a masterpiece of biological evolution, combining strength, sensitivity, and adaptability in a compact form.
1. Mechanical Complexity:
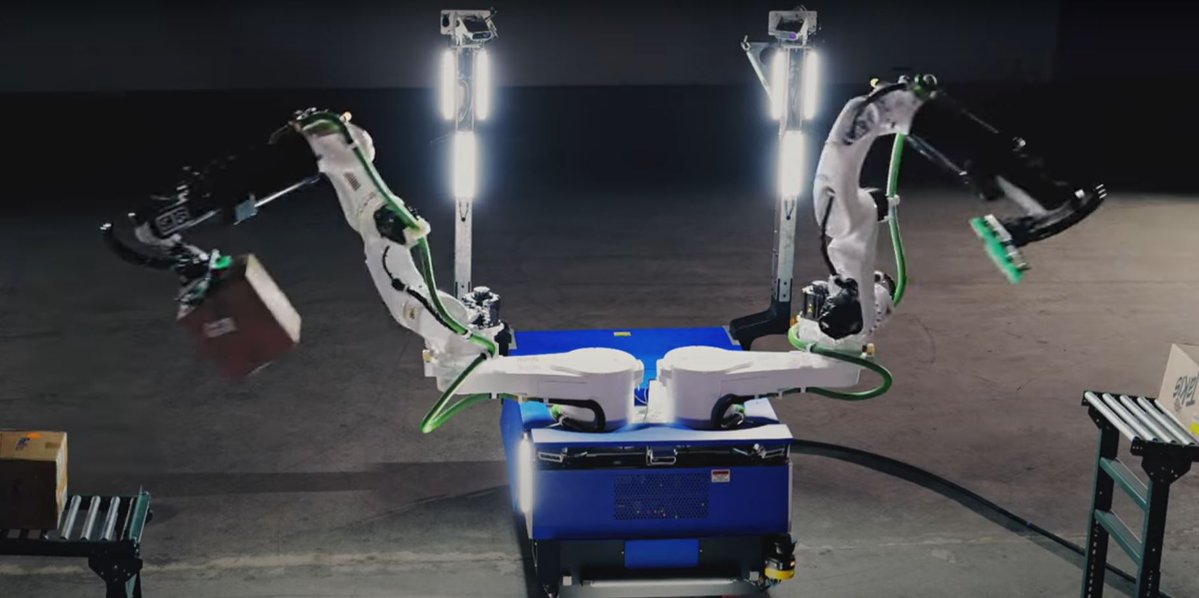
The human hand comprises 27 bones, including those in the wrist. These are articulated by over 30 muscles, with at least 17 in the palm and forearm dedicated solely to hand and finger movement. This intricate system allows for a staggering range of motions: flexion, extension, abduction, adduction, and circumduction. The opposable thumb, capable of touching the base of the little finger, is the cornerstone of precision grip, a feature largely unique to primates.
2. Sensory Feedback and Neural Control:
Dexterity is not just about movement; it is about informed movement. Our fingertips are densely packed with mechanoreceptors like Meissner’s corpuscles for light touch and Pacinian corpuscles for vibration providing constant, high-fidelity feedback to the brain. This sensorium creates a closed-loop system: the brain sends motor commands, the hand executes, and sensory data streams back in real-time for instantaneous micro-adjustments. Picking up a fragile egg, unscrewing a stubborn jar lid, or feeling for a key in a pocket are all tasks managed subconsciously through this exquisite feedback loop.
3. The “Soft” Problem:
Robots traditionally excel in “structured” environments where everything is precisely positioned and predictable. The human hand thrives in “unstructured” ones. It can handle objects of unknown weight, texture, and fragility (compliance), adapt its grip on the fly, and recover from slips. This ability to interact with the soft, messy, and uncertain physical world has been the biggest hurdle for robotics.
B. The Technological Convergence Making It Possible
The recent breakthroughs in robotic dexterity are not the result of a single invention but a powerful convergence of several advanced technologies.
A. Advanced Actuation and Materials:
Moving away from rigid motors, researchers are pioneering “soft robotics.” This involves using compliant materials like silicones, shape-memory alloys, and pneumatic artificial muscles. These systems can bend, stretch, and conform to objects, mimicking the natural compliance of human tissue. Tendon-driven hands, where motors in the “forearm” pull cables (tendons) to actuate fingers, provide a more biomimetic and lightweight design.
B. The Sensor Revolution:
Modern robotic hands are being clothed in sophisticated artificial skin. This skin embeds:
-
Tactile Sensor Arrays: High-resolution grids that map pressure distribution.
-
3D Force-Torque Sensors: Measure the exact forces and rotational twists at the fingertips.
-
Bio-inspired Sensors: Devices that replicate the function of specific human receptors to detect slip, texture, and thermal properties.
C. The AI and Machine Learning Engine:
This is arguably the most critical component. The vast data from new sensors is processed not by painstakingly hand-coded algorithms, but by powerful machine learning models.
-
Reinforcement Learning (RL): Robots practice tasks in millions of digital simulations, learning through trial and error. They experiment with countless grip strategies for a given object until they master it. This “virtual training” is then transferred to the physical robot.
-
Deep Learning and Computer Vision: Coupled with advanced depth-sensing cameras, AI allows the robot to not just see an object but understand its 3D geometry, predict its weight distribution, and infer the best approach to grasp it, even if it has never seen that exact object before.
D. Improved Kinematic Designs:
Robotic hand designs are becoming more elegant and effective. Some prioritize anthropomorphism (human-like appearance and function), while others explore novel, task-optimized morphologies like hands with two opposing fingers and a thumb, or even modular fingers that can be swapped for specific tools. The goal is the optimal balance of complexity, cost, and functionality.
C. Real-World Applications and Industry Transformations
The implications of dexterous robots extend far beyond laboratory demonstrations. They are set to permeate and disrupt multiple sectors.
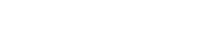
A. Logistics and E-commerce Fulfillment:
Imagine a warehouse where robots no longer just move bins but can pick individual, irregularly shaped items a toy, a bottle of shampoo, a bag of coffee from a jumbled bin and pack it neatly into a box. This “piece-picking” problem has been a multi-billion-dollar challenge for companies like Amazon. Dexterous robots promise to automate this final frontier, drastically speeding up order fulfillment and reducing reliance on repetitive human labor.
B. Advanced Manufacturing and Assembly:
While automation is already prevalent, delicate assembly tasks threading wires through tiny holes, installing flexible gaskets, polishing complex surfaces have resisted automation. Dexterous robots can handle small, compliant parts, perform quality inspection by feel, and work safely alongside humans on collaborative assembly lines, taking over ergonomically difficult tasks.
C. Healthcare and Surgery:
The impact here is twofold. First, in surgical robotics, next-generation systems will provide surgeons with unprecedented control and haptic feedback, enabling micro-scale procedures with superhuman precision and less tissue trauma. Second, in patient care, assistive robots could help elderly or disabled individuals with activities of daily living (ADLs) such as feeding, brushing hair, or opening containers, restoring a degree of personal independence.
D. Hazardous Environments and Space Exploration:
Dexterous robots can perform complex maintenance in environments too dangerous for humans: repairing deep-sea infrastructure, handling radioactive materials in nuclear facilities, or conducting intricate repairs on the exterior of the International Space Station. For future Mars missions, robots that can use human tools and perform sample collection with care would be invaluable.
E. Agriculture and Food Processing:
Selectively harvesting ripe fruit without bruising it, butchering meat with precision to reduce waste, or packaging delicate baked goods are all tasks requiring a gentle, adaptive touch. Dexterous automation could address labor shortages and improve efficiency in these sensitive sectors.
D. The Road Ahead: Challenges and Ethical Considerations
Despite the exciting progress, significant challenges remain on the path to ubiquitous dexterous robotics.
A. Cost and Complexity:
Creating a hand with human-level dexterity remains prohibitively expensive for widespread adoption. Simplifying designs and scaling production are key to moving from research labs to factory floors and homes.
B. Unified AI Control Architecture:
Developing a single, robust AI “brain” that can generalize learning across thousands of different tasks and objects much like the human brain does is an ongoing challenge. Current systems often excel at one task but struggle to adapt fluidly to completely novel situations.
C. Energy Efficiency and Portability:
The human hand is remarkably energy-efficient. Powering dozens of actuators and processing sensor data in real-time requires substantial energy, which is a constraint for mobile or battery-operated robots.
D. The Critical Ethical and Socioeconomic Dialogue:
As with any transformative technology, the rise of dexterous robots brings profound questions:
-
Job Displacement: Which manual and service jobs are most at risk, and how can societies manage the transition through retraining and education?
-
Accessibility and Inequality: Will this technology widen the gap between wealthy and developing nations, or between large and small businesses?
-
Safety and Autonomy: How do we ensure these powerful, autonomous systems make safe decisions, especially when interacting closely with humans?
-
Human Identity and Purpose: As machines master physical skills once uniquely human, how does our perception of work, craft, and human value evolve?
Conclusion: A New Partnership with the Mechanical

The achievement of human-like dexterity in robotics marks the end of an era where machines were confined to cages and predetermined paths. We are entering an age of collaborative intelligence, where robots can navigate and manipulate the unstructured world we inhabit. They will not simply replace human hands but will augment them, taking on the dull, dirty, and dangerous tasks while freeing human potential for more creative, strategic, and interpersonal endeavors. The dexterous robot is more than a tool; it is a testament to human ingenuity, a mirror reflecting our own biological complexity, and a partner in building a more capable and, if guided wisely, more prosperous future. The handshake between human and machine is becoming literal, and its grip is growing stronger every day.







{kind=link}